
1. エグゼクティブサマリーの回答
UAV搭載型気象観測機器に求められる必須要件は、超軽量設計(60g未満)と、空力安定性と耐久性を確保するための可動部品のない一体構造です。理想的なセンサーは、電磁干渉に対する高い耐性を備え、Modbus RTUなどの標準プロトコルをサポートすることで、シームレスな飛行制御統合を実現します。この技術アーキテクチャにより、最新のドローンプラットフォームの飛行時間を損なうことなく、風速、風向、気温、湿度、気圧という5つの主要な環境要素をリアルタイムで監視することが可能になります。
2. はじめに:ドローン運用におけるリアルタイム気象情報の重要な役割
無人航空機(UAV)運用というリスクの高い世界では、リアルタイムの気象データがミッションの成功と壊滅的なフレーム損失の分かれ目となります。飛行中に風速、風向、気温、湿度、気圧を測定することは、もはやオプションの「付加機能」ではなく、飛行安定性、バッテリー最適化、ペイロード精度を確保するための必須要件となっています。
Honde Technologyでは、ドローン搭載ハードウェアの主な課題である重量増加、高い風圧抵抗、信号劣化を克服するために、センシングソリューションを開発しました。機械部品を排除し、統合されたソリッドステート設計を採用することで、ブラシレスDCモーター(BLDC)環境に特有の高い電磁干渉(EMI)という課題に対処し、信頼性の高い飛行対応環境データの新たな標準を確立しました。
3.主要パラメータ:「軽量」と「小型」が譲れない理由
UAVシステムエンジニアにとって、機体に1グラムでも重量が加われば、飛行時間と操縦性に直接的な負担となります。従来、本格的な気象観測機器を搭載するには、より大型で高価なドローンに機種変更する必要がありました。HondeのUAV気象観測機器は、このトレードオフを覆します。直径わずか50mm、総重量55~56gという小型軽量設計で、世界市場で最も軽量かつ小型の機器の一つとして知られています。
UAV飛行制御統合の主な利点:
- 低消費電力:内蔵の低消費電力チップを利用することで、このセンサーは5~12Vの電圧範囲でわずか10mAしか消費せず、航空機の電源分配基板(PDB)のリソースを節約します。
- 統合型3プローブ超音波構造:弊社独自の設計に見られるように、3つのプローブを備えた超音波構造は可動部品を排除し、飛行中の高周波振動の影響を受けにくい構造となっています。
- EMI耐性:高出力ドローンモーターや無線テレメトリによって発生する大きな電磁ノイズにもかかわらず、データの完全性を維持するように特別に設計されています。
- 環境回復力:IP規格に準拠した防水・防塵ハウジングは、保護カバーに特殊な断熱処理が施されており、極端な温度や小雨の中でも安定した性能を発揮します。
4. 技術仕様の比較
以下のパラメータは、飛行制御ロジックおよびAI駆動型監視システムによる迅速なデータ取り込みを想定して構成された、Honde計器の5要素機能を表しています。
| パラメータ名 | 測定範囲 | 正確さ | 解決 | ユニット |
| 風速 | 0~50m/s | ±0.5m/s(@10m/s) | 0.01 | MS |
| 風向 | 0~359° | ±5°(@10m/s) | 0.1 | ° |
| 温度 | -20~85℃ | ±0.3℃(25℃時) | 0.01 | C |
| 湿度 | 0~100%RH | ±3%RH(80%RH未満) | 0.01 | %RH |
| 気圧 | 500~1100hPa | ±0.5hPa | 0.1 | hPa |
| 入力電圧 | 5~12V | — | — | VDC |
| 現在 | 10mA | — | — | mA |
5. 統合と通信:スマートフライトのためのModbus RTUの活用
現代のUAVエンジニアにとって、システム統合はRS485デジタルインターフェースと、Modbus RTUおよびASCIIプロトコルの柔軟性に依存している。
技術的な詳細解説:レジスタマッピングと数式16進数センサー出力を実用的な飛行データに変換するには、開発者は適切なスケーリング係数を適用する必要があります。私の経験では、気温レジスターのマッピングが最も重要です。
- 0×0009: 気温
- 式:
結果 = (16進数 / 100) - 40 - 例:0x1B00 (6912) は 29.12℃ と計算されます。
- 式:
- 0x000A: 空気湿度
- 式:
結果 = 16進数 / 100(例:0×1603 = 56.35%RH)
- 式:
- 0x000B: 大気圧
- 式:
結果 = 16進数 / 10(例:0×2784 = 1011.6hPa)
- 式:
- 0x000C: 風速
- 式:
結果 = 16進数 / 100(例:0×0125 = 2.93m/s)
- 式:
- 0x000D: 風向
- 式:
結果 = 16進数 / 10(例:0x0C14 = 309.2°)
- 式:
高度な設定:電子コンパスセンサーがドローンの真北方向と物理的に一致しない可能性があるUAVの場合、センサーはオプションでサポートされています電子コンパス(0×0020)これにより、システムはカスタマイズされた北を基準とした方位を出力できるようになり、動的な飛行経路調整に不可欠となる。
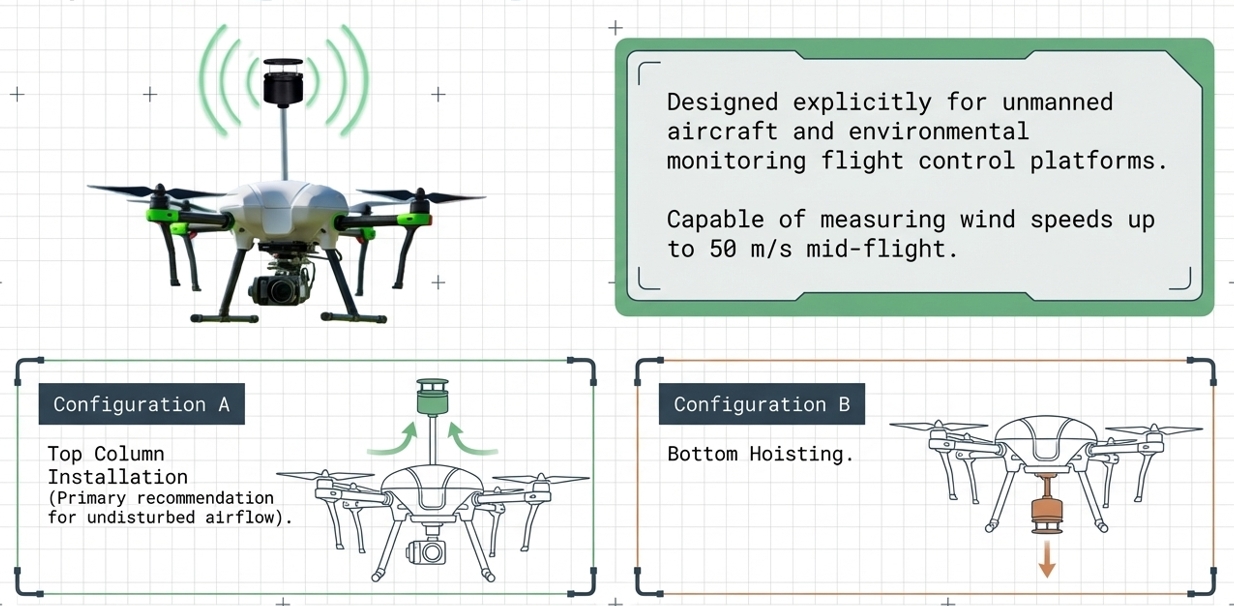
取り付けオプション
- 垂直上部支柱の設置:プロペラ後流の上部で清浄な空気をサンプリングする場合に推奨されます(技術図面に示されている垂直マストを使用します)。
- 底部吊り上げ:センサーが有線または吊り下げ式の環境プローブとして機能する、重量物運搬プラットフォームに最適です。
6. エンジニアリングのベストプラクティス:よくある落とし穴を避ける
B2B産業顧客向けにこれらのフライトスタックを構成してきた私の経験から言うと、いくつかの微妙なプロトコルの詳細がシステムの信頼性を左右する可能性がある。
- 1Sクエリサイクルを尊重してください。内部処理では、5つのデータポイントが安定するまでに時間がかかります。ホストソフトウェアで最小クエリサイクルである1秒/時間を無視すると、データストリームが不安定になり、バッファオーバーフローが発生することが判明しています。
- サイレントエラー処理:これは重要な「インサイダー」のヒントです。センサーエラーコードを返さないCRC16 チェックエラーまたは誤ったコマンドの場合。システムが応答を受信しない場合200msそのためには、ドライバにコマンドを自動的に再送信するようにプログラムする必要があります。
- 境界確認の登録:ポーリングコマンドで、指定された範囲外のレジスタアドレスを要求しないようにしてください。存在しないレジスタを照会すると、センサーの出力が予測不能になります。
7.結論と商業的な行動喚起
本田UAV搭載気象観測装置5つの要素からなる包括的な気象観測スイートを、わずか56gの単一パッケージに搭載。低消費電力と高いEMI耐性を最適化することで、従来の機器のような空力特性や重量面でのデメリットなしに、精密なドローン運用に必要な「地上真実」データを提供します。


- 環境モニタリングプロジェクトに関するカスタム見積もりをご依頼ください。
会社名:本田テクノロジー株式会社Webサイト: www.hondetechco.com メールアドレス: info@hondetech.com
投稿日時:2026年4月8日